
نمای کلی
جرثقیل پل، که معمولاً به عنوان "رانندگی" شناخته می شود، نوعی ماشین آلات بالابر است که به طور گسترده در شرکت های صنعتی و معدنی استفاده می شود، مکانیسم عملیاتی آن از سه سیستم رانندگی اساساً مستقل، سیستم رانندگی ماشین، سیستم رانندگی قلاب، اینورتر K-DRIVE تشکیل شده است. در بالای سه سیستم رانندگی با موفقیت اصلاح شد، موارد زیر عمدتاً فرآیند تغییر سیستم رانندگی قبل و بعد از راه رفتن را توصیف می کند.

طرح مزایا
- کنترل بردار حلقه باز جریان میدان گرا، متغیرهای موتور کاملا جدا شده، گشتاور فرکانس پایین زیاد، پاسخ سریع و غیره.
- KD600 از حالت کنترل بردار حلقه باز آزاد PG و حالت V/F بردار استفاده می کند و پیکربندی سطح قدرت دنده اول را تقویت می کند.
- محدوده فرکانس: تنظیم بخش 0.5-600 هرتز، تنظیم پیوسته stepl-ess.
- محدوده ولتاژ کاری: 380 ولت ± 20 درصد و ولتاژ باس فوراً به 360 ولت دی سی کاهش می یابد تا عملکرد بدون مشکل داشته باشد.
- ظرفیت اضافه بار: 150% جریان نامی، 1 دقیقه مجاز. 200٪ جریان نامی، 1 ثانیه مجاز است.
- مشخصات گشتاور: گشتاور شروع، بیشتر از 2 برابر گشتاور نامی. گشتاور فرکانس پایین، بیشتر از 1.6 برابر گشتاور نامی در 1 هرتز. گشتاور ترمز بیشتر از گشتاور نامی است.
ویژگی های عملیاتی
- مکانیزم بالابر جرثقیل دارای گشتاور راه اندازی بزرگی است که معمولاً بیش از 150 درصد گشتاور نامی است. اگر اضافه بار و سایر عوامل در نظر گرفته شود، حداقل 200% گشتاور نامی باید در طول فرآیند استارت و شتاب تامین شود.
- هنگامی که مکانیسم بالابر به سمت پایین حرکت می کند، موتور در حالت تولید نیروی احیا کننده قرار می گیرد و باید ترمز مصرف انرژی یا بازخورد احیا کننده به شبکه باشد.
- بار مکانیزم بالابر هنگامی که جسم بلند شده از زمین خارج می شود یا با زمین برخورد می کند، به شدت تغییر می کند و مبدل فرکانس باید بتواند بار ضربه ای را به آرامی کنترل کند.
- سرعت حرکت آستر مکانیزم حرکت جلو و عقب جرثقیل در طول طراحی مکانیکی زیاد نیست، مبدل را می توان برای افزایش سرعت مناسب برای بهبود راندمان کار استفاده کرد.
نمودار سیم کشی ساده
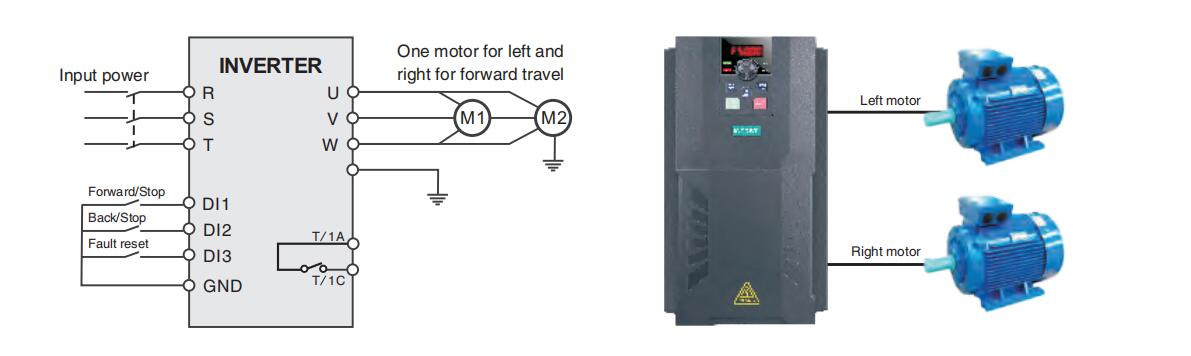
پارامتر setting و توضیحات(پارامترهای حرکت موتور چپ و راست)
| پارامتر | توضیح دهید | تنظیم پارامتر | توضیح دهید |
| P0-00=0 | کنترل VF | P5-00=1 | به جلو |
| P0-04=1 | توقف شروع ترمینال خارجی | P5-01=2 | بعدا انجام دهید |
| P0-06=1 | تنظیم فرکانس دیجیتال | P6-00=2 | خروجی خطا رله 1 |
| P0-14=60.00 | حداکثر فرکانس | P4-01=1.6KW | برق موتور متصل |
| P0-16=60.00 | فرکانس حد بالایی | P4-02=380V | ولتاژ نامی موتور |
| P0-11=60.00 | فرکانس تنظیم دیجیتال | P4-04=3.3A | جریان نامی موتور |
| P0-23 = 3.0 ثانیه | زمان شتاب | P4-05=50Hz | فرکانس نامی موتور |
| P0-24 = 2.0 ثانیه | زمان کاهش سرعت | P4-06=960R/Min | سرعت نامی موتور |
| توجه: هنگامی که یک مبدل فرکانس با دو موتور استفاده می شود، اکیداً توصیه می شود که یک رله حرارتی منطبق در انتهای جلوی هر موتور برای محافظت از هر موتور نصب شود. | |||
تجزیه و تحلیل اثر عملیات
مبدل فرکانس سری KD600 تبدیل تبدیل فرکانس را در سیستم سفر انجام داده است و اثر تغییر شکل tr نسبتا ایده آل است که عمدتاً در موارد زیر نشان داده شده است:
- شروع نرم و توقف نرم در هنگام راه اندازی تحقق می یابد، که تاثیر آن بر شبکه برق را کاهش می دهد.
- پس از استفاده از مبدل فرکانس، کنتاکتور شیفت اصلی و مقاومت تنظیم کننده سرعت حذف می شوند، که نه تنها باعث صرفه جویی در هزینه تعمیر و نگهداری می شود، بلکه زمان خرابی تعمیر و نگهداری را نیز کاهش می دهد، در نتیجه خروجی را افزایش می دهد.
- هنگامی که قلاب اصلی در فرکانس 5 هرتز ~ 30 هرتز کار می کند، اثر صرفه جویی در انرژی بسیار آشکار است.
- مبدل فرکانس برای کنترل حرکت جلو و عقب استفاده می شود و سری مکانیسم های حرکتی چپ و راست می توانند کار فرکانس را درک کنند. با فرض اطمینان از ایمنی، راندمان کار تا حد زیادی بهبود می یابد و حجم کار تعمیر و نگهداری تجهیزات مسافرتی به دلیل تعویض مکرر کنتاکتورهای AC نیز کاهش می یابد.
سخنان پایانی
مبدل فرکانس برای کنترل راه رفتن جلو و عقب و سری مکانیزم راه رفتن چپ و راست استفاده می شود که می تواند کار اورکلاک را تحقق بخشد، با فرض اطمینان از ایمنی کارایی کار را تا حد زیادی بهبود بخشد و همچنین حجم کار تعمیر و نگهداری تجهیزات رانندگی را کاهش دهد. تعویض مکرر کنتاکتورهای AC
سایت اپلیکیشن

زمان ارسال: نوامبر-17-2023